
Particle IoT
Guide d'utilisation des cartes Particle Boron et Argon comme enregistreurs de données 3D-PAWS pour un stockage local et des déploiements connectés au cloud.
Le Particle Data Logger est une plateforme microcontrôleur connectée en réseau utilisée dans les déploiements 3D-PAWS pour la collecte de données environnementales, le stockage local et la transmission vers le cloud.
3D-PAWS prend en charge deux cartes Particle :
Particle Boron – Connectivité cellulaire LTE
Particle Argon – Connectivité Wi-Fi
Les deux s'intègrent au matériel et au firmware 3D-PAWS pour créer une station météorologique fiable et déployable sur le terrain.
Rôle du système dans 3D-PAWS
Dans une station 3D-PAWS, la carte Particle :
Collecte les mesures des capteurs environnementaux connectés
Stocke les données horodatées sur une carte microSD
Transmet les données vers des plateformes cloud
Permet la surveillance et le diagnostic à distance
Le Boron est généralement utilisé pour des déploiements cellulaires éloignés. L'Argon est utilisé lorsque des infrastructures Wi‑Fi stables sont disponibles.
Diapositives d'instructions pour assembler l'enregistreur de données
Vidéos tutoriels pour l'assemblage du Data Logger
Cette playlist vidéo montre l'assemblage complet de l'instrument. Vous pouvez basculer entre les vidéos en utilisant l'icône de liste en haut à droite ou en utilisant le bouton « avancer rapidement » en bas à gauche.
Capteurs pris en charge
Capteur de lumière (capteur hérité)
Pluviomètre
Anémomètre
Girouette
Bouclier radiatif (Température, Pression et Humidité Relative)
Température de globe noir
Qualité de l'air (PM 2.5)
Capteur de distance (cours d'eau, submersion côtière et hauteur de neige)
Humidité et température du sol
Humidité foliaire
Téléchargez le firmware 3D-PAWS

Cliquez sur le bouton vert Code près du haut de la page du dépôt.
Sélectionnez Télécharger ZIP dans le menu déroulant pour télécharger l'intégralité du dépôt au format ZIP.
Découvrez les bases de Particle avec ces ressources essentielles :
Configurez votre appareil Particle : https://setup.particle.io/
Dépannage avec Modèles de LED d'état et modes de l'appareil
Faire connaissance avec la Console Particle : Introduction à la Console
Gérez votre flotte 3D-PAWS avec Particle Products : Introduction aux Products
Architecture du Particle Data Logger
Dans les stations basées sur Particle, les données des capteurs sont transmises via l'infrastructure cloud de Particle avant d'atteindre les services de données 3D-PAWS.
Les appareils Particle gèrent :
le streaming d'événements (messages FS, INFO)
la communication cloud (commandes DoAction)
les mises à jour de firmware à distance
la gestion des appareils via la Particle Console
Intégrer les données Particle Cloud avec le portail de données CHORDS
Intégrations Particle / CHORDSUtiliser une SIM tierce avec le Boron
Certains pays ne sont pas compatibles avec la SIM interne IoT de Particle. Suivez ce document pour utiliser une SIM externe avec votre enregistreur de données Particle : Configuration Particle pour SIM tierce
Variantes de micrologiciel pour différentes applications
L'enregistreur de données 3D-PAWS Particle prend en charge plusieurs configurations de micrologiciel conçues pour des applications spécifiques de surveillance environnementale. Ces variantes de micrologiciel optimisent les intervalles de mesure, la consommation d'énergie et l'intégration des capteurs pour différents scénarios de déploiement.
Les versions de micrologiciel les plus récentes sont disponibles sur le dépôt GitHub 3D-PAWS :
Le micrologiciel pour stations basées sur Particle suit la convention de nommage :
Chaque variante de micrologiciel est conçue pour prendre en charge une application de surveillance particulière.
Surveillance des ondes de tempête et du vent
Cette configuration de micrologiciel est conçue pour des déploiements de surveillance côtière et suit des procédures de mesure conformes à aux normes du Centre national des services océanographiques opérationnels (CO-OPS) du National Ocean Service de la NOAA .
Les caractéristiques clés incluent :
mesures du niveau d'eau enregistrées toutes les six minutes
mesures calculées en utilisant une moyenne d'échantillons discrets centrés sur l'intervalle de six minutes
compatibilité avec les réseaux nationaux de surveillance côtière
Cette configuration prend en charge la collecte de données standardisée et de haute qualité pour les applications de surveillance des ondes de tempête et côtières.
Surveillance ultra-basse consommation des cours d'eau et de la neige
Cette configuration de micrologiciel est conçue pour des déploiements à distance où la disponibilité d'énergie est limitée.
Les caractéristiques principales incluent :
consommation d'énergie minimisée
optimisation des intervalles de mesure
fonctionnement fiable dans les systèmes alimentés par batterie ou par énergie solaire
Cette configuration convient bien pour des stations de surveillance du niveau des cours d'eau ou de la profondeur de neige situées dans des zones éloignées ou difficiles d'accès.
Surveillance régulière de l'alimentation électrique
Pour les sites où les contraintes d'alimentation sont moins strictes, ce micrologiciel prend en charge des mesures plus fréquentes et des capteurs supplémentaires.
Les caractéristiques typiques incluent :
fréquence de mesure accrue
prise en charge de capteurs supplémentaires avec écrans pare-radiation
surveillance continue du niveau des cours d'eau ou de la profondeur de neige
Cette configuration est généralement utilisée sur des sites disposant de systèmes solaires plus importants ou d'une disponibilité d'alimentation fiable.
Unités de capteurs distants LoRa
3D-PAWS prend également en charge des unités de capteurs distants construites avec des cartes Adafruit Feather équipées de radios LoRa.
Ces unités sont conçues pour la détection distribuée à faible consommation d'énergie et peuvent être déployées avec des capteurs tels que :
sondes d'humidité du sol
pluviomètres
capteurs de distance pour mesures de cours d'eau ou de neige
Chaque unité Feather distante transmet ses mesures de capteur via la radio LoRa à une station centrale.
La station centrale (typiquement une enregistreur de données Particle Boron) sert de passerelle en :
réception de données LoRa provenant de plusieurs unités distantes
transmettant les données au Particle Cloud via une connectivité cellulaire
Cette architecture permet une surveillance fiable de capteurs largement distribués, même lorsque les emplacements individuels des capteurs n'ont pas de connectivité Wi‑Fi ou cellulaire directe.
Budget énergétique du système Particle
Le budget suivant montre tous les capteurs disponibles qui peuvent être intégrés dans l'enregistreur de données Particle.
Composant
Fonction
Tension d'alimentation
Courant moyen (mA)
Courant de pointe (mA)
Remarques
Particle Boron
Microcontrôleur cellulaire
3,3–4,2 V
19.7
184
Transmission LTE toutes les 15 minutes
FeatherWing SD + RTC
Enregistrement des données et horloge temps réel
3,3 V
5.3
100
Écriture sur la SD chaque minute
Adafruit SHT31-D
Capteur de température et d'humidité
3,3 V
0.5
0.5
Toujours allumé
Adafruit BMP390
Capteur de pression et altimètre
3,3 V
0.8
0.8
Toujours allumé
Adafruit MCP9808
Capteur de température haute précision
3,3 V
0.2
0.2
Toujours allumé
AS5600
Capteur de position rotationnelle pour la girouette
3,3 V
4.5
4.5
Toujours allumé
2 × SS451A Effet Hall
Capteurs à interrupteur magnétique pour pluviomètre et anémomètre
3,3 V
9.0
9.0
Toujours allumé
SI1145
Capteur de lumière UV/IR/visible
3,3 V
0.4
0.4
Toujours allumé
Adafruit PMSA003I
Capteur de qualité de l'air (PM2.5/PM10)
3,3-5 V
100
100
Toujours allumé
MB7363 MaxSonar
Capteur de distance ultrasonique
3,3 V
3.4
3.4
Toujours allumé
Tinovi SOIL-MULTI-5-I2C
Capteur d'humidité et de température du sol à 5 niveaux
3,3 V
10
10
Toujours allumé
Tinovi PM-WCS-3-I2C
Capteur d'humidité et de température du sol
3,3 V
10
10
Toujours allumé
Adafruit RFM95W LoRa
Émetteur‑récepteur radio LoRa (réception uniquement)
3,3 V
10
10
Mode réception uniquement
Système total
—
—
174.3
422.8
Tous les capteurs alimentés en continu
Profil de puissance du système :
Consommation moyenne d'énergie : ~0,87 W (174,3 mA @ 5 V)
Consommation de puissance de pointe : ~2,11 W (422,8 mA @ 5 V, pendant la transmission LTE + écriture SD)
Autonomie de la batterie (Voltaic V50, 13 400 mAh): ~2,3 jours (sans solaire)
Panneau solaire nécessaire : Panneau de 5 W assure un fonctionnement indéfiniment avec ~4 heures de soleil plein par jour
Remarques :
Les valeurs de pointe reflètent des événements brefs de transmission et d'écriture sur la SD ; les valeurs moyennes représentent une opération continue typique.
La radio LoRa est toujours en mode réception (pas de pics de transmission).
Tous les capteurs I2C sont compatibles avec la logique 3,3–5 V et peuvent être chaînés via des connecteurs STEMMA QT/Qwiic.
Schéma de câblage 3D-PAWS Particle
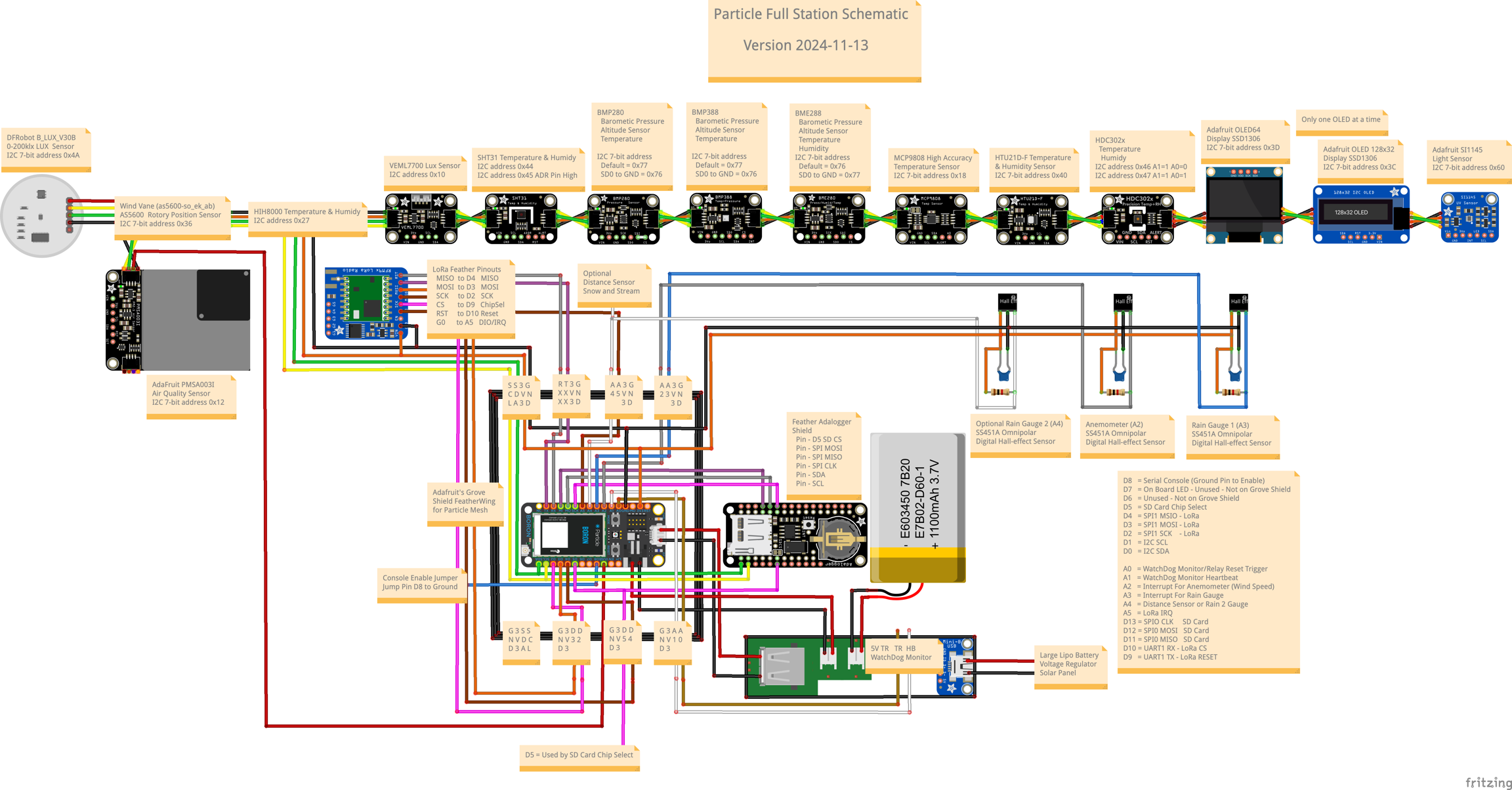
Mis à jour
Ce contenu vous a-t-il été utile ?